The Description of Finite Sequential Processes
Kenneth E. Iverson
Harvard University, Massachusetts, U.S.A.[a]
Introduction
The economical execution of fully-specified algorithms provided by the automatic computer has greatly increased the use of complex algorithms in information theory and other fields. This increased use has in turn generated a need for consistent and powerful programming languages for the description and analysis of complex algorithms. A programming language is commonly characterized as problem-oriented or machine-oriented, according as it is intended mainly for the description and analysis of algorithms or for their execution. The language outlined[b] in the present paper was developed primarily for description and analysis, but also lends itself well to execution. The present emphasis is on description and analysis.
A programming language should (a) allow a clear and simple representation of the sequence in which steps of an algorithm are performed, (b) provide a concise and consistent notation for the operations occurring in a wide range of processes, (c) permit the description of a process to be independent of the choice of a particular representation for the data, (d) allow economy in operation symbols, and (e) provide convenient subordination of detail without loss of detail.
The sequence of execution of statements will be specified by their order of listing and by arrows connecting a statement to its successor. Branch points, at which alternative successors are chosen according to the outcome of a comparison between a pair of quantities, will be represented by a colon placed between the compared quantities, and by a label attached to each arrow showing the relation under which it is followed. Any well-defined relation may be employed, e.g. equality, inequality, or set membership. The conditions at each branch point must be exhaustive, and the listed successor is associated with all conditions not included in the labelled arrows.
Commonly occurring operations to be defined
include the floor
 x
x (largest integer not exceeding x),
the ceiling
(largest integer not exceeding x),
the ceiling
 x
x ,
and the residue of x modulo m,
to be denoted by |x, m|.
The common logical operations and, or,
and not will be
denoted by ^, ∨, and ¯,
and will be augmented by the relational statement
(xR y)
defined as follows.
If x and y are any quantities
and R is any binary
relation defined upon them,
then (xR y)
is a logical variable whose value is 1 or 0 according
as x does or does not stand
in the relation R to y.
For example, the absolute value of y
may be defined as follows:
,
and the residue of x modulo m,
to be denoted by |x, m|.
The common logical operations and, or,
and not will be
denoted by ^, ∨, and ¯,
and will be augmented by the relational statement
(xR y)
defined as follows.
If x and y are any quantities
and R is any binary
relation defined upon them,
then (xR y)
is a logical variable whose value is 1 or 0 according
as x does or does not stand
in the relation R to y.
For example, the absolute value of y
may be defined as follows:
|x| = x(1 - 2(x < 0))
To illustrate the use
of the floor and ceiling operations,
consider a rectangular array of dimension
x = b × |y, a| + y ÷ a
and
y = a × |x, b| + x ÷ b
These are the transformations used in determining accessibility in a serial-parallel memory of a bands with b slots per band. They may be derived from the identity
y = a ×
y
÷ a
+ |y, a|
Ordered Sets
The description of a process can be made independent
of its representation by defining certain fundamental operations
upon finite ordered sets.
The element of a finite simply ordered set B
of dimension (number of elements) ν(B)
can be indexed by the integers 1, 2, …, ν(B)
such that Bi
is the i-th element of the set.
The k-th successor
of an element x of B
will then be denoted
by  k
k k.
If B is the set of integers,
the symbol B may be elided,
and if k = 1 it may be elided;
hence i↑k denotes
the k-th successor of the integer i,
and i ↑ denotes the integer i + 1.
k.
If B is the set of integers,
the symbol B may be elided,
and if k = 1 it may be elided;
hence i↑k denotes
the k-th successor of the integer i,
and i ↑ denotes the integer i + 1.
The successor operation defined
upon an element of B can be extended to
any subset C of B as follows:
k k
Two sets A and B are equal (A = B) if they contain the same elements, but are identical (A ≡ B) only if they also have the same order. Simple modifications in the standard definitions of intersection and union provide a closed system for ordered sets. To achieve economy of operation symbols, intersection and union are denoted by ^ and ∨, already used for the analogous logical operations and, and or. Potential ambiguity is avoided by using distinctive symbols for each class of operand; italics for single variables, lower case boldface italics for vectors, upper case boldface italics for matrices, and ordinary Roman characters for literals, i.e. for characters such as the numerals and the letters of the alphabet which have fixed accepted meanings.
A second set of indices, called contracurrent indices will be assigned to the elements of any set A. These indices run from –ν(A) to –1. The k-th element may therefore be denoted alternatively by A k or A–j, where j + k = ν(A) + 1. In particular, the terminal elements may be denoted by A1 and A–1. Contracurrent indices will also be employed for vectors and matrices.[c]
A set obtained from a set B by deleting the first i and the last j elements is called a solid subset or an infix of B. An infix C of B is also called a prefix of B if C1 = B1, or a suffix if C–1 = B–1. The statement
C  {(x, y)}
{(x, y)}
specifies C as the infix of B having terminal elements x and y. The symbol B may be elided if B is the set of integers.
Program 1 illustrates the conventions introduced so far. If H j1 is the suit and H j2 the denomination of the j-th card in a hand of thirteen playing cards, and if
D ≡ {deuce, trey, …, king, ace}
is the set of denominations, then the quantity q determined by the program is the length of the longest run in any one suit.
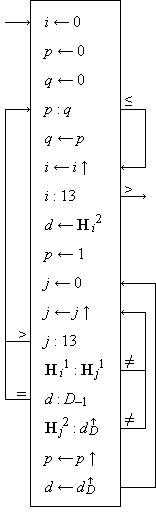 |
| Program 1.
Program to determine the length of the longest run in the card hand H |
A left-pointing arrow associates
the specifying quantity
on the right of each statement
with the specified quantity on the left.
The arrow is used instead of the sign
of equality because it eliminates
ambiguity and reserves the sign
of equality as a relation to be
used in relational statements only.
Structured Operands
Significant subordination of detail can be achieved by generalizing each operation defined upon simple variables to structured arrays such as vectors and matrices. For example, if p and q are logical vectors (i.e. each component is a logical variable), then
r ←  |
↔ | r i = i |
 |
i ε {(1, ν(p))} | |
| r ← p ^ q | ↔ | r i = p i ^ q i | |||
| r ← p ∨ q | ↔ | r i = p i ∨ q i |
Moreover, if x and y are numerical vectors, then
| z ← x + y | ↔ | z i = x i + y i | |
| z ← x × y | ↔ | z i = x i × y i | |
| z ← x ÷ y | ↔ | z i = x i ÷ y i |
Operations such as floor, ceiling, and residue are extended analogously.
The application of any associative binary operation
 to all components of a vector x is denoted
by /x.
Thus ×/x is the product and +/x
is the sum of all components of x.
The latter will also be denoted by σ(x)
and be called the weight of x.
The usual notations for matrix algebra are retained,
i.e. xy for a scalar product,
and XY for a product of matrices.
It is clear that xy =
to all components of a vector x is denoted
by /x.
Thus ×/x is the product and +/x
is the sum of all components of x.
The latter will also be denoted by σ(x)
and be called the weight of x.
The usual notations for matrix algebra are retained,
i.e. xy for a scalar product,
and XY for a product of matrices.
It is clear that xy =
Greek symbols (in the appropriate type face)
will be used for specially defined quantities.
Thus, the unit vectors
∊i
are logical vectors such that
(∊i) j
= 1 if and only if
The conventional vector product of two space vectors
(to be denoted by
 y
y
x y =
x ↑ × y ↓ –
x ↓ × y ↑
A trivial formal manipulation shows that
y x
= –(x y).
The orthogonality theorem
y) = 0
| x(x y) |
= | x(x ↑ × y ↓ – x ↓ × y ↑) | |
| = | σ(x × x ↑ × y ↓ – x × x ↓ × y ↑) | ||
| = | σ((x × x ↑ × y ↓) ↓ – x × x ↓ × y ↑) | ||
| = | σ(x ↓ × x × y ↓ 2 – x × x ↓ × y ↑) |
Since the × operator is commutative,
and since y
Individual components of structured operands can be selected by subscripts and superscripts: x i for the i-th component of the vector x, Ai for the i-th row vector of a matrix A, A j for the j-th column vector, and A j i for the ij-th element. More generally, it is necessary to specify selected subsets of the components. Since the selection is, for each component, a binary operation, it can be specified by an associated logical vector of the same dimension. Thus for an arbitrary vector x and compatible logical vector u (that is, ν(u) = ν(x)), the statement
z ← u/x
implies that the z is obtained
by suppressing from x those components
x i
for which u i = 0.
The operation u/x is called compression
of x by u.
For example, if u =
Two types of compression must be defined for matrices; row compression, defined by
| Z ← u/X | ↔ | Z i = u/X i, | i ε {(1, μ(X))} | |
and column compression, defined by | ||||
| Z ← u//X | ↔ | Z j = u/X j, | j ε {(1, ν(X))} | |
For example, if the matrix M represents a ledger of μ(M) bank accounts, with the column vectors M1, M2, M3, and M4 denoting name, account number, address, and balance, respectively, then the operation of preparing a list P of the name, account number and balance, for all accounts whose balance exceeds 1,000 can be completely prescribed as follows.
P ←
(M4 > 1000∊)//( 3/M)
3/M)
The expansion of a vector x by a logical vector u is denoted by u\x and is defined as follows.
z ← u\x
↔ u/z = x and
 /x = 0
/x = 0
It is necessary that σ(u) = ν(x). Clearly ν(z) = ν(u). Row expansion (denoted by u\X) and column expansion (u\\X) are defined analogously.
The compress and expand operations provide a powerful extension of ordinary matrix algebra. For example, any numerical vector can be decomposed according to the identity
x =
\/x +
u\u/x
Matrices can be decomposed similarly. Moreover, the conventional operations on partitioned matrices can be generalized in a systematic manner. A few of the more important identities are, for example:
| (u/X)Y | = | X(u\\Y) | |
| (u\X)Y | = | X(u//Y) | |
| XY | = | (u/X)(u//Y) +
(/X)(//Y) |
|
| u/(XY) | = | X(u/Y) | |
| u//(XY) | = | (u//X)Y | |
| (u/v)/(u/X) | = | (u ^ v)/X |
Maximization over those components of x for which u j = 1 will be denoted by u⌈x. More precisely,
v ← u⌈x
specifies a logical vector v such that v/x = m∊ and that
(((v ^ u)/x) < m∊) = ∊
Graphically, v is obtained
by lowering a horizontal line
over a plot of x
until it touches the largest component
of u/x,
and then marking with a 1 all components
of u/x touched by the line.
Thus if x =
 |
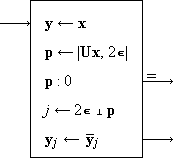
| Program 2.
Complete program for the simplex algorithm of linear programming |
The vector y determined is the
optimal solution of the following system:
maximize cy subject to the constraints
The operations occurring in Program 2 can be used in a formal analysis of its behaviour, For example,
u/P = u/((u/A)[–1] A) = (u/A)[–1] (u/A) = I
and P therefore contains an identity matrix I in the columns corresponding to the feasible basis u. Moreover, since
g = c – (u/c)P
thenu/g = u/c – u/(u/c)P = u/c – (u/c)(u/P) = u/c – (u/c)I = 0
Hence the components of the modified cost function g are zero for all included variables, as desired.
The base b value of the vector x
is denoted by b ⊥ x
and defined as the value of x
in the mixed base number system defined
by the radices
For example, the standard single-error-correcting
Hamming code for n binary digits can be described
by a logical matrix U such that
ν(U) = n,
log2(n + 1),
 |
| Program 3. Correction in a Hamming error-correcting code |
For non-numeric vectors, the expand and compress operations do not suffice. The mesh of x and y on u is defined as follows:
z ← \x, u, y\
↔ /z = x
and u/z = y
Clearly, ν(z) = ν(u),
ν(x) = σ(), and
ν(y) = σ(u).
If, for example,
\x, u, y\ = (m, o, n, d, a, y)
The mask of x and y on u is defined as follows:
z ← /x, u, y/
↔
/z = /x
and u/z = u/y
Clearly,
| \x, u, y\ | = | /\x, u, u\y/ |
|
| /x, u, y/ | = | \/x, u, u/y\ |
|
| and | |||
| u\x | = | \0, u, x\ |
Analogous column mask, row mask, column mesh, and
row mesh operations are defined upon matrices.
Permutations
If two sets A and B are equal (but not necessarily identical), one is said to be a permutation of the other, and there exists a vector p such that
B i = A pi
Moreover, the components of p are
some permutation of the integers
Permutation will be extended analogously to vectors and matrices. For example, X p p denotes an elementary similarity transformation on the square matrix X. It is easily shown that
p q = ⍳ ↔ q p = ⍳
and the permutations p and q
are then said to be inverse.
Clearly
Any bi-unique mapping from an element b of an arbitrary set B to a correspondent a of an arbitrary set A can be represented by a permutation vector p such that B i maps into A pi. If, for example,
| A ≡ {apple, booty, dust, eye, night} | |
| B ≡ {Apfel, Auge, Beute, Nacht, Staub} |
and the mapping is from a German word
to its English correspondent, then
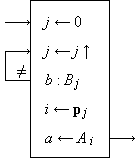 |
| Program 4. A mapping specified by the permutation p |
Program 4 describes a mapping from the argument b∊B to the function a∊A prescribed by the vector p. The process consists of three steps, the ranking of b in B, the permutation of the index j by p, and the selection of the correspondent A pi. Since any set can be considered as a vector, the process can be expressed more concisely in terms of vector operations as shown in Program 5.
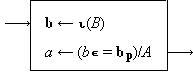 |
| Program 5. Program 4 re-expressed in terms of vectors |
The expression ⍳(B) denotes the identification vector of the set B, defined as the set considered as a vector, i.e.
b ← ⍳(B) ↔ b i = B i
A matrix whose rows and columns
are all permutation vectors will be called
a permutation matrix.[d]
A permutation matrix can clearly represent
the operations in an abstract group.
The group is Abelian if and only if
the matrix is symmetric.
Files
A vector is frequently represented (stored) in a serial-access file in which the components are made available only in their natural sequence. To describe algorithms upon vectors so represented, it is convenient to introduce special notation for a file as follows. A file Φ of length n is a representation of a vector x of dimension n arranged as follows:
λ(1), x1, λ(2), x2, …, λ(n), x n, λ(n + 1)
The operation of transferring a component
from a file to specify a quantity y is called
reading the file and is denoted by
The position of a file Φ will be denoted
by π(Φ).
Thus the statement
A file may be produced by a sequence of recording statements, either forward:
0Φ ← x i, i = 1, 2, …, n
or backward1Φ ← x i, i = n, n – 1, …, 1
As in reading, each forward (backward) record operation increments (decrements) the position of the file by one. A file which is only recorded during a process is called an output file of the process; a file which is only read is called an input file.
Each partition symbol may assume one of several values,
λ0,
λ1, …,
λ p,
the partitions with larger indices demarking
larger subgroups within the file.
Thus if each component x j
were itself a vector y j
(i.e. x is a matrix),
then the last component of each y j
might be followed by the partition λ1,
while the remaining components would
each be followed by λ0.
The last component of the entire array
might be followed by a partition λ2.
In recording an item, the associated partition
is indicated by listing it after the item
(e.g.
The indication provided by the distinct partition symbols is used to control an immediate (p + 1)-way branch in the program following each read operation. The branch is determined by the partition symbol which terminates the read.
Different files occurring in a process will be distinguished by righthand subscripts and superscripts, the latter being generally reserved to denote major classes of files (e.g. input and output). An array of files is therefore indexed like a matrix and the notation for compression may be applied to specify subsets of the array.
File notation is particularly useful
in the description of sorting algorithms
and of algorithms employing
so-called “pushdown stores”.
The author is indebted to Dr. F.P. Brooks, Jr.
for many important suggestions.
Notes
Discussion
R.A. FAIRTHORNE: There can be no very profitable discussion of new notations until they have been applied for some time by different people to different jobs. Always the inventor and his critics overlook some essential considerations.
On another aspect, I suggest that the author and others try to find better names for some of the operations, whatever the notations may be. In particular, “row (column) compression” implies that all elements remain in altered form, whereas in fact some are abstracted. Instead I would suggest “removal”, “omission”, “abbreviation”, “curtailment”, or “retention”, and for the inverse operation “insertion”, “augmentation”, “inflation”, according to whether the original part is referred to, or the parts that are added or removed. The final choice, whatever the term, must depend both on intrinsic descriptive merit and on harmony with other terms.
J. SHEKEL: In cases where vectors and matrices are distinguished from scalars by colour * or font, I suggest that special “zero” and ”equality” symbols should be used. This will enable some kind of “dimensional” check on the formulas and equations.
Incidentally, the line
(x ≠ y) = xΔy
that was on the blackboard at the meeting illustrates the use of the same “equals” sign for two different meanings. Since you are constructing a new symbolism anyway, it would be better to avoid such ambiguities from the start.
I would propose the word “sifting” for the compress operation u/x. The operator u could then be called a “sieve”.
Concerning floors and ceilings, a general word of caution may be given against too much reliance on mnemonic techniques. Take the well known rhyme:
Thirty days hath September, etc.
It seems that the words that rhyme are not the words that count, and vice versa …
K.E. IVERSON in reply: The notation has (as remarked in the oral presentation) been applied to a variety of jobs by a number of different people. These include language translation (A.G. Oettinger), machine organization (F.P. Brooks, Jr.), switching theory (P. Calingaert), and sorting theory and operations research (K.E. Iverson).
Concerning the nomenclature, I agree that the connotations of the word “compression” do not fit the case exactly. However, I find it preferable to the words suggested by Mr. Fairthorne (and to other alternatives which I have considered). For example, the terms “row removal” and “row omission” would imply deletion of an entire row of a matrix and would therefore not conform to the usage whereby the qualifier “row” indicates an operation upon a row of a matrix. The word “abbreviation” connotes no loss of information, and the word “curtail” connotes deletion of a tail or suffix only, both contrary to the intended meaning of the general compress operation u/x.
Answering Dr. Shekel, I must stress that none of the special vectors (such as ∊ j, ⍺ j, ⍵ j, ∊) contain a specification of dimension. As remarked in the oral presentation, this is a decided convenience, since in most cases the required dimension is implied by compatibility with associated operands. Where necessary, dimension can be specified by compression by a suitable prefix vector. For example, the factorial may be defined by the expression
n! = ×/(⍺n/⍳) + (n = 0).
The zero symbol used for vectors
as well as scalars can, if desired,
be replaced by the zero vector  ,
although I see no resulting gain in clarity.
,
although I see no resulting gain in clarity.
The sign of equality is indeed used in two distinct senses, but the second occurs only in exposition, never in an algorithm.
On your second point the word “sifting” suggested for “compression” seems to possess no companion suitable for the converse operation of expansion.
As regards your third question — yes, moderation in all things. The caution seems somewhat gratuitous, however, since none of the mnemonic devices used appeal to anything so indirect and cumbersome as a rhyme.
* Used in the original typescripts; to indicate bold face —Ed.
Originally appeared in the Proceedings of a Conference on Information Theory, C. Cherry and W. Jackson, Editors, Imperial College, London, 1960-08-29. Images of the pages of the paper are available from here and here.
| created: | 2009-11-09 17:05 |
| updated: | 2013-09-24 13:00 |